Vor02 va mieux.
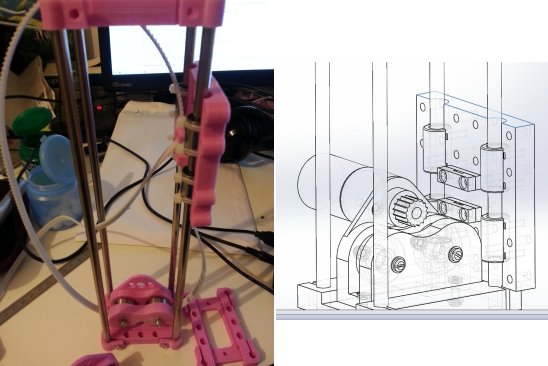
Il y a quelque mois, Vor02 a donné son moteur au bras robotisé de l’Electrolab pour la coupe de France de robotique ; le laissant immobile et triste. S’en suivis des séances à tester différent moteur d’imprimante (papier), pour finir sur une solution viable, le moteur et son démultiplicateur planétaire de visseuse à bas prix de chez Leroy Merlin.
J’ai réalisée une pièce pour tenir le moteur, Pierre m’a fait une pièce en alu pour tenir l’assemblage sur le chassis en mécano .Un domino d’électricien par ci, des câbles par là, un collier et voilà Vor02 est de retour !
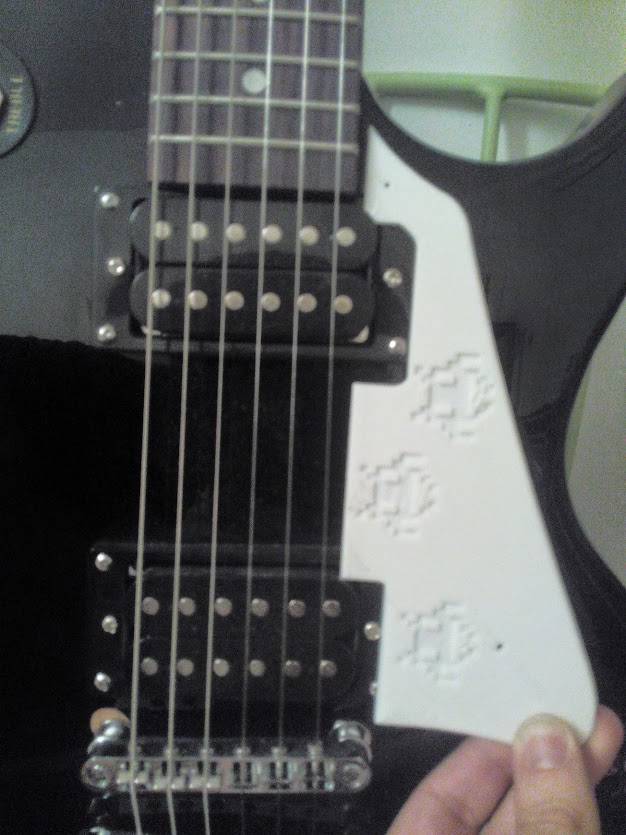
Entre temps, j’ai réalisé 4 pièces pour une table basse que nous avons vendus $_$ et fait des bidouilles (montage d’un cable USB explosé). La première version du pickguard (ou scratchplate) pour ma guitare à gauche, et la seconde à droite, réalisé avec l’aide de Pierre.

Une grenouille lumineuse et sa boite (un NE555 bientot ?)
Pierre et Julien ont finis la conception de l’impressionnant Vor5, l’hexapode.

Nous avons aussi découvert un défaut d’usure sur la Prusa. Un des support de roulement vertical maintenant le moteur de l’axe y à beaucoup de jeu. La pièce sera changée prochainement. En ce moment, Joël travail sur le câblage de l’extrudeur de la Prusa pour que nous puissions le changer rapidement.
Et pour finir, toutes nos imprimantes en plein travail.







 Nous avons donc acheter des dongles USBasp sur ebay. Ils ont l’avantage d’être bon marché. N’y connaissant pas grand chose en la matière nous nous sommes tourné vers le site du fabricant ATMEL pour y trouver un environnent de développement. Chose facile ATMEL fournir AVRStudio gratuitement : génial !
Nous avons donc acheter des dongles USBasp sur ebay. Ils ont l’avantage d’être bon marché. N’y connaissant pas grand chose en la matière nous nous sommes tourné vers le site du fabricant ATMEL pour y trouver un environnent de développement. Chose facile ATMEL fournir AVRStudio gratuitement : génial !