Quelques news de l’asso VoRoBoTics… Comme vous l’aurez certainement compris nous n’avons plus de locaux. Depuis 2 ans environ l’association « tourne » au ralenti. En attendant, nous nous sommes rabattu sur le BRICOLAB de Groslay qui nous gentiment accueilli. Ne cherchez pas leur/notre site, il n’y en a pas. Tout au plus un compte Facebook…
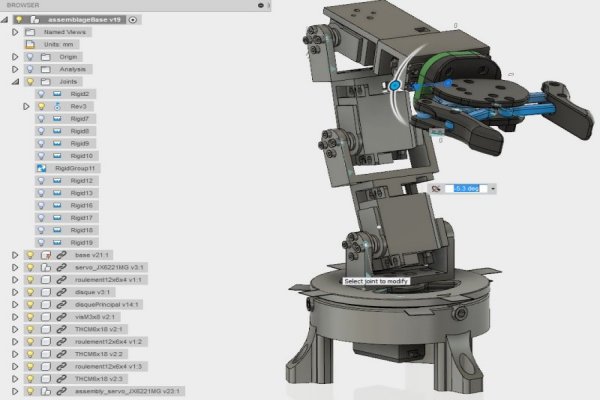
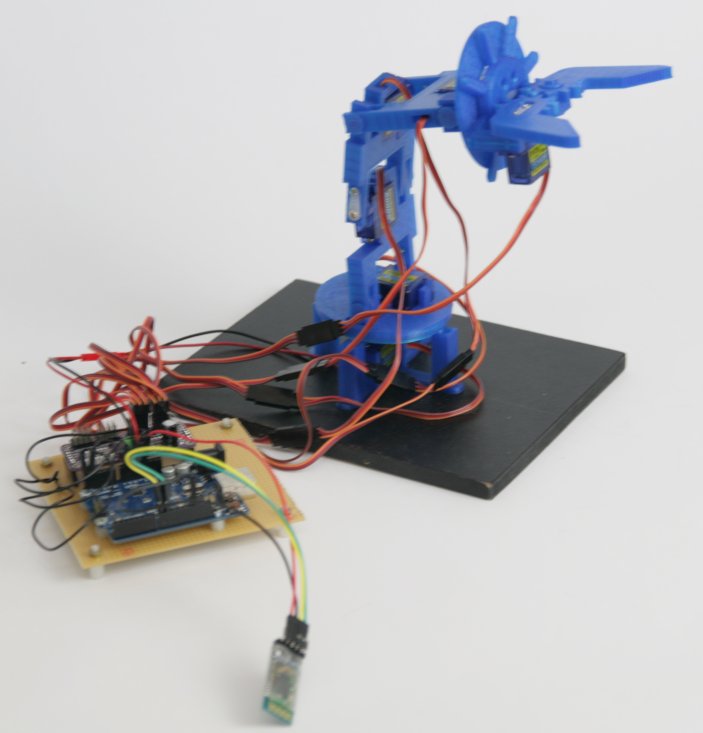
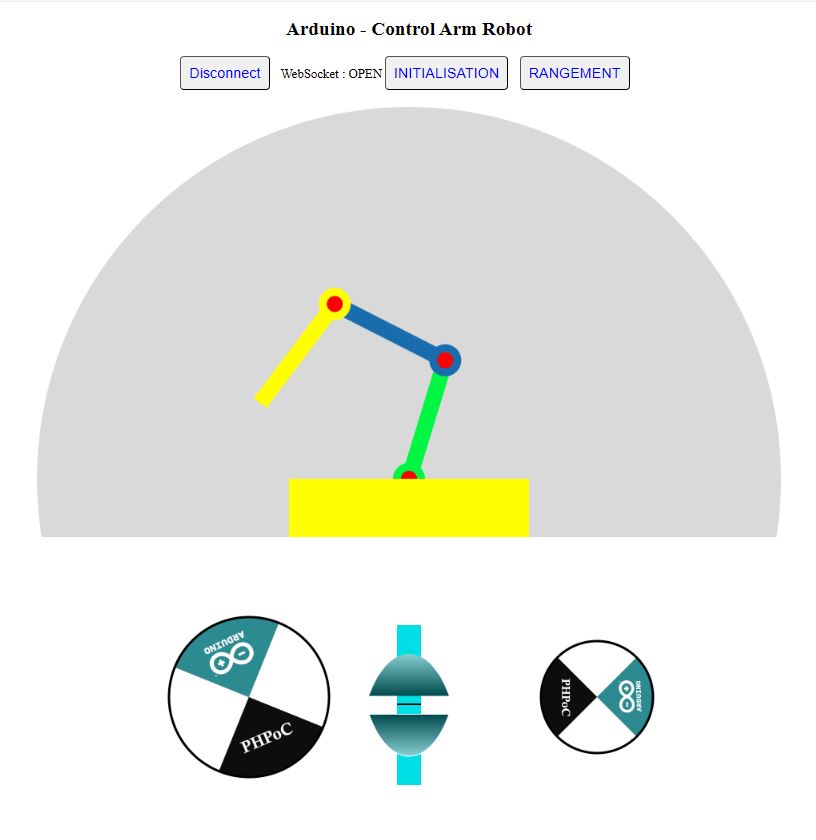
Avec Gilles, nous continuons à travailler sur notre commande Web de bras robot et après 2 ans de travail acharné, nous avons pu enfin tout mettre en ligne… Cliquer sur l’image !
Et à part cela, j’ai débuté un nouveau projet public sous Bitbucket : MyArduinoTemplates qui à terme contiendra tout un tas de petits projets prêt à l’emploi en commençant pas Wifimanager dans un ESP32…


 Le projet HowTo_Doc est un document (EN FRANÇAIS) expliquant comment il faut s’organiser pour Créer / Gérer un projet depuis le début.
Le projet HowTo_Doc est un document (EN FRANÇAIS) expliquant comment il faut s’organiser pour Créer / Gérer un projet depuis le début.